Forschung | VeBaS-UAV
VeBaS-UAV
- VeBaS-UAV
- 01.03.2020 - 30.11.2022
- Federal Ministry for Economic Affairs and Energy
- Central Innovation Program for SMEs (ZIM) - Cooperation networks (ZIM-Koop)
- 188.000€
- Prof. Dr. Wilhelm Nüßer
- Matthias Füller, Ralf Siebert
- THOLEG Civil Protection Systems, Welzow; ESYS GmbH, Berlin; Gesellschaft zur Förderung angewandter Informatik e.V. (GFal), Berlin
Resource-optimized drones for forest reforestation
VeBaS-UAV project: Logistics and route optimization for the use of UAVs to protect tree seedlings from browsing
Storms, drought, forest fires and bark beetle infestation – this has taken its toll on Germany’s forests in recent years. The removal of damaged timber, the conversion to climate-adapted mixed forests and, last but not least, reforestation are measures in which the federal and state governments are therefore investing heavily.
The VeBaS-UAV project is dedicated to the question of how the reforestation of severely damaged forests can be better supported. A special problem is being addressed here: when new seedlings are planted for reforestation, they must be protected against browsing by game for the first few years. At present, this protection against browsing is usually achieved by manually attaching grids or plastic constructions around the plant. On the one hand, this procedure is time-consuming and involves a considerable risk in inaccessible regions such as mountain slopes.
Another approach to browsing protection, on the other hand, uses biological browsing protection agents that deter the game so that the browsing rate decreases. However, the problem is that these substances have to be applied regularly and this is time-consuming and labor-intensive for the reasons mentioned above.
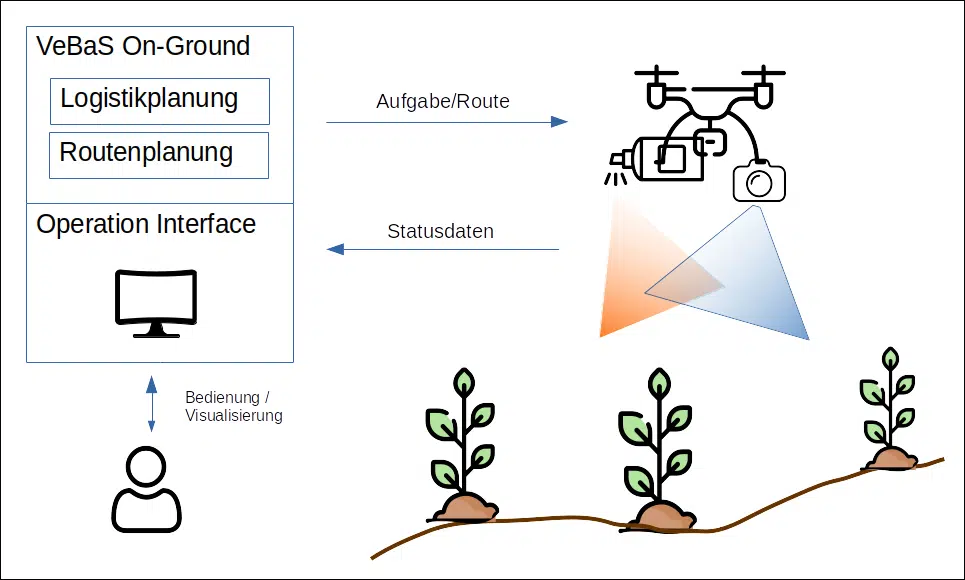
This is where the VeBaS-UAV project comes in. In a multi-stage process, the positions of the new seedlings will first be recorded using GPS. The anti-biting agent is then applied at regular intervals using a drone (UAV). The drone flies to the known seedling positions. Fine positioning is carried out on the seedling using image recognition so that the terminal shoot is sprayed. Due to the limited resources in the form of battery charge and payload, an optimal flight route for the drone must be determined. Conceptually, this is a form of the well-known traveling salesman problem, which is modified here by the fact that no fixed costs can be assigned to the paths between the seedlings. The costs must always be redetermined, e.g. to take into account the current wind and rain conditions, undergrowth, etc. etc.
In addition to evaluating suitable algorithms that also take into account the drone’s energy consumption, the project also aims to investigate the interface between drones, base stations and GIS backend systems. The aim here is to view the use of drones as an end-to-end process and execute it in a resource-optimized manner.
